| independent displacements and/or rotations that specify the orientation of a body or system Note 1 to entry: A marine body can experience three linear and three rotational motions as depicted in Figure 1 and Figure 2. Positive angular and translational directions of displacement are shown by the axis labels +A, +B, +C, +D, +E, and +F.
Note 2 to entry: The principal axis is parallel to the mean water surface and aligned with the longest, plan form, dimension of the device. The principal axis for a symmetric device will be parallel to the mean water surface and aligned with a chosen direction of interest. The direction of incident energy will be through the centre of gravity and may be at an angle to the principal axis. 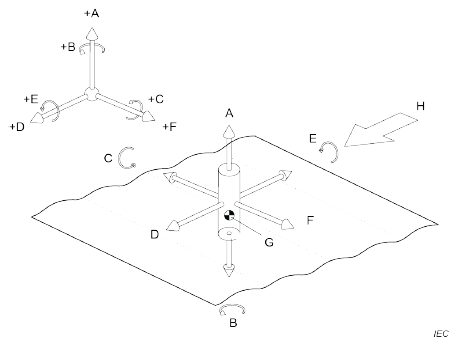
Key Figure 1 – Six degrees of freedom – Floating device 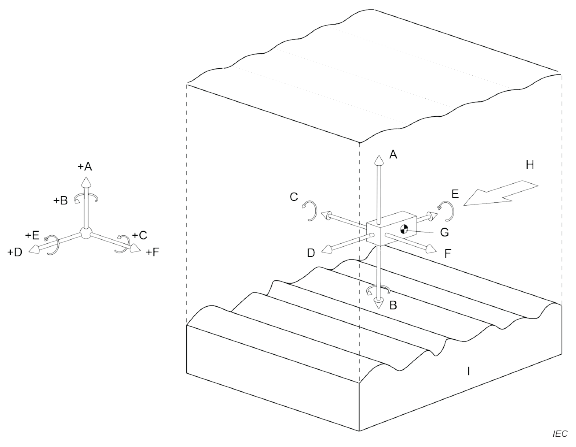
Key | A | Heave | D | Surge | G | Centre of gravity | | B | Yaw | E | Roll | H | Incident energy at zero-degree heading | | C | Pitch | F | Sway | I | Seabed | Figure 2 – Six degrees of freedom – Submerged device |